
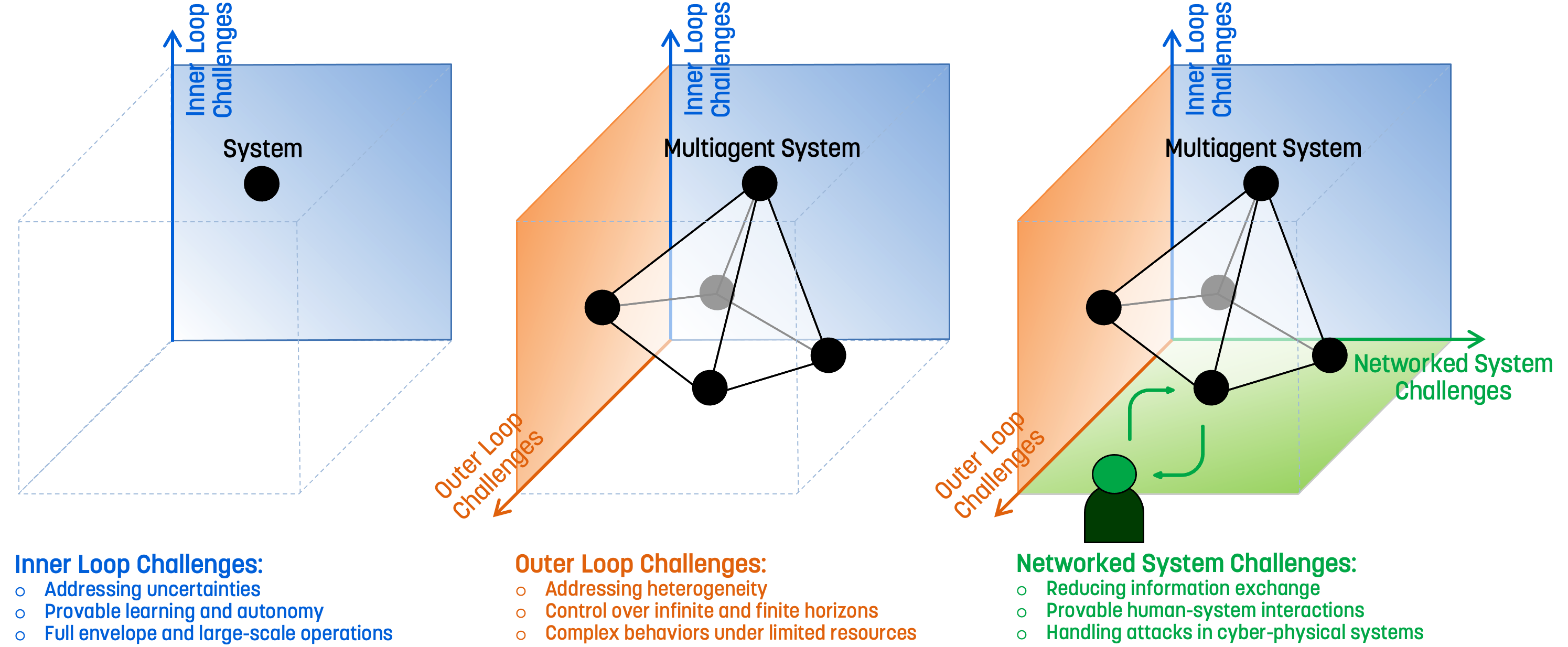
Researchers at the LACIS have authored 83 journal and 250 conference publications, which obtained 3799 citations (updated on February 21, 2023). All these publications can be accessed directly at Google Scholar. Below you will find our selected publications on the three key research areas that we push the state of the art in dynamical systems and controls. These areas are entitled as i) "uncertain systems" that we address important inner loop control challenges related to control of sole systems such as addressing uncertainties, establishing provable learning and autonomy architectures, and ensuring full envelop and large-scale operations; ii) "multiagent systems" that we address important outer loop control challenges related to distributed estimation and control of multiagent systems such as addressing heterogeneity, establishing control architectures over infinite and finite horizons, and composing complex behaviors under limited resources; and iii) "networked systems" that we develop tools and methods to reduce system-to-ground station and system-to-system information exchange, establish provable human-system interactions, and handle attacks in cyber-physical systems (see figure above).
Tutorials
Gruenwald, B. C., Yucelen, T., De La Torre, G., & Muse, J. A. (2020). Adaptive control for uncertain dynamical systems with nonlinear reference systems. International Journal of Systems Science, 51(4), 687-703 [link].
Yucelen, T. (2019). Model reference adaptive control. Wiley Encyclopedia of Electrical and Electronics Engineering, 1-13 [link].
Transient Performance Recovery
Dogan, K. M., Yucelen, T., Haddad, W. M., & Muse, J. A. (2020). Improving transient performance of discrete‐time model reference adaptive control architectures. International Journal of Adaptive Control and Signal Processing, 34(7), 901-918 [link].
Ristevski, S., Dogan, K. M., Yucelen, T., & Muse, J. A. (2019). Transient performance improvement in reduced-order model reference adaptive control systems. IFAC Workshop on Adaptive and Learning Systems, 52(29), 49-54 [link].
Gruenwald, B. C., Yucelen, T., & Muse, J. A. (2017). Direct uncertainty minimization framework for system performance improvement in model reference adaptive control. Machines, 5(1), 9 [link].
De La Torre, G., Yucelen, T., & Johnson, E. N. (2016). A new model reference control architecture: Stability, performance, and robustness. International Journal of Robust and Nonlinear Control, 26(11), 2355-2377 [link].
Gruenwald, B., & Yucelen, T. (2015). On transient performance improvement of adaptive control architectures. International Journal of Control, 88(11), 2305-2315 [link].
Yucelen, T., De La Torre, G., & Johnson, E. N. (2014). Improving transient performance of adaptive control architectures using frequency-limited system error dynamics. International Journal of Control, 87(11), 2383-2397 [link].
Yucelen, T., & Johnson, E. (2013). A new command governor architecture for transient response shaping. International Journal of Adaptive Control and Signal Processing, 27(12), 1065-1085 [link].
Yucelen, T., & Haddad, W. M. (2012). Low-frequency learning and fast adaptation in model reference adaptive control. IEEE Transactions on Automatic Control, 58(4), 1080-1085 [link].
Calise, A. J., & Yucelen, T. (2012). Adaptive loop transfer recovery. Journal of Guidance, Control, and Dynamics, 35(3), 807-815 [link].
Yucelen, T., & Calise, A. J. (2010). Kalman filter modification in adaptive control. Journal of Guidance, Control, and Dynamics, 33(2), 426-439 [link].
Enforcing Performance Guarantees
Arabi, E., Yucelen, T., & Balakrishnan, S. (2020). A command governor approach to set-theoretic model reference adaptive control for enforcing partially adjustable performance guarantees. International Journal of Dynamics and Control, 8, 675-689 [link].
Arabi, E., & Yucelen, T. (2019). A set-theoretic model reference adaptive control architecture with dead-zone effect. Control Engineering Practice, 89, 12-29 [link].
Arabi, E., & Yucelen, T. (2019). Experimental results with the set-theoretic model reference adaptive control architecture on an aerospace testbed. In AIAA SciTech 2019 Forum (p. 0930) [link].
Arabi, E., & Yucelen, T. (2019). Set-theoretic model reference adaptive control with time-varying performance bounds. International Journal of Control, 92(11), 2509-2520 [link].
Arabi, E., Yucelen, T., Gruenwald, B. C., Fravolini, M., Balakrishnan, S., & Nguyen, N. T. (2019). A neuroadaptive architecture for model reference control of uncertain dynamical systems with performance guarantees. Systems & Control Letters, 125, 37-44 [link].
Arabi, E., Gruenwald, B. C., Yucelen, T., & Nguyen, N. T. (2018). A set-theoretic model reference adaptive control architecture for disturbance rejection and uncertainty suppression with strict performance guarantees. International Journal of Control, 91(5), 1195-1208 [link].
Arabi, E., Gruenwald, B. C., Yucelen, T., & Steck, J. E. (2017). Guaranteed model reference adaptive control performance in the presence of actuator failures. In AIAA SciTech (p. 0669) [link].
Yucelen, T., & Haddad, W. M. (2012). A robust adaptive control architecture for disturbance rejection and uncertainty suppression with L∞ transient and steady‐state performance guarantees. International Journal of Adaptive Control and Signal Processing, 26(11), 1024-1055 [link].
Scalability Concept
Jaramillo, J., Wilcher, K., Yucelen, T., & Pakmehr, M. (2023). Scalability Concept for Model Reference Adaptive Control of Gain Scheduled Dynamical Systems. In AIAA SciTech 2023 Forum (p. 1813) [link].
Jaramillo, J., Yucelen, T., & Wilcher, K. (2020). Scalability in model reference adaptive control. In AIAA SciTech 2020 Forum (p. 1119) [link].
Schatz, S. P., Yucelen, T., De La Torre, G., Gruenwald, B., Johnson, E. N., & Holzapfel, F. (2016). Scalability of closed-loop system responses in adaptive control schemes. In 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV) (pp. 1-6) [link].
Schatz, S. P., Yucelen, T., Gruenwald, B. C., & Holzapfel, F. (2015). Application of a novel scalability notion in adaptive control to various adaptive control frameworks. In AIAA Guidance, Navigation, and Control Conference (p. 0608) [link].
Computing Actuator Limits
Dogan, K. M., Kurttisi, A., Yucelen, T., & Koru, A. T. (2022). A Projection Operator-Based Discrete-Time Adaptive Architecture for Control of Uncertain Dynamical Systems With Actuator Dynamics. IEEE Control Systems Letters, 6, 3343-3348 [link].
Gruenwald, B. C., Yucelen, T., Dogan, K. M., & Muse, J. A. (2020). Expanded reference models for adaptive control of uncertain systems with actuator dynamics. Journal of Guidance, Control, and Dynamics, 43(3), 475-489 [link].
Gruenwald, B. C., Yucelen, T., Muse, J. A., & Wagner, D. (2019). Computing stability limits for adaptive control laws with high-order actuator dynamics. Automatica, 101, 409-416 [link].
Gruenwald, B. C., Yucelen, T., Dogan, K. M., & Muse, J. A. (2019). On adaptive control of uncertain dynamical systems in the presence of actuator dynamics and amplitude saturation limits. In 2019 American Control Conference (pp. 423-428) [link].
Gruenwald, B. C., Sarsilmaz, S. B., Yucelen, T., & Muse, J. A. (2019). A new model reference adaptive control law to address actuator amplitude saturation. In AIAA SciTech 2019 forum (p. 1424) [link].
Gruenwald, B. C., Muse, J. A., Wagner, D., & Yucelen, T. (2018). Adaptive architectures for control of uncertain dynamical systems with actuator dynamics. In Advances in Computational Intelligence and Autonomy for Aerospace Systems (pp. 369-408). Reston, VA: AIAA Press [link].
Gruenwald, B. C., Wagner, D., Yucelen, T., & Muse, J. A. (2016). Computing actuator bandwidth limits for model reference adaptive control. International Journal of Control, 89(12), 2434-2452 [link].
Addressing Unmodeled Dynamics
Dogan, K. M., Yucelen, T., & Muse, J. A. (2022). Adaptive control systems with unstructured uncertainty and unmodelled dynamics: A relaxed stability condition. International Journal of Control, 95(8), 2211-2224 [link].
Dogan, K. M., Yucelen, T., & Muse, J. A. (2021). An asymptotic decoupling approach for adaptive control with unmeasurable coupled dynamics. International Journal of Adaptive Control and Signal Processing, 35(3), 342-356 [link].
Dogan, K. M., Yucelen, T., Yildirim, E., & Muse, J. A. (2019). Experimental results of a model reference adaptive control law on an uncertain system with unmodeled dynamics. In AIAA SciTech 2019 Forum (p. 2336) [link].
Dogan, K. M., Gruenwald, B. C., Yucelen, T., & Muse, J. A. (2019). Adaptive architectures for control of uncertain dynamical systems with actuator and unmodeled dynamics. International Journal of Robust and Nonlinear Control, 29(12), 4228-4249 [link].
Dogan, K. M., Gruenwald, B. C., Yucelen, T., & Muse, J. A. (2018). Relaxing the stability limit of adaptive control systems in the presence of unmodelled dynamics. International Journal of Control, 91(8), 1774-1784 [link].
Yang, B., Yucelen, T., Shin, J. Y., & Calise, A. (2010). An LMI-based analysis for adaptive flight control with unmodeled input dynamics. In AIAA Guidance, Navigation, and Control Conference (p. 8044) [link].
Addressing Unmatched Uncertainties
Yayla, M., Arabi, E., Kutay, A. T., & Yucelen, T. (2018). Command governor‐based adaptive control for dynamical systems with matched and unmatched uncertainties. International Journal of Adaptive Control and Signal Processing, 32(8), 1124-1144 [link].
Arabi, E., Yucelen, T., & Gruenwald, B. C. (2017). Model reference adaptive control for uncertain dynamical systems with unmatched disturbances: A command governor-based approach. In Robotics and mechatronics for agriculture (pp. 185-211). CRC Press [link].
Yang, B. J., Yucelen, T., Shin, J. Y., & Calise, A. (2010). LMI-based analysis of an adaptive flight control system with unmatched uncertainty. In AIAA Infotech@ Aerospace 2010 (p. 3436) [link].
Full Envelope Operations
Jaramillo, J., Wilcher, K., Yucelen, T., & Pakmehr, M. (2022). Gain scheduled set-theoretic model reference adaptive control. In AIAA SciTech 2022 Forum (p. 0610) [link].
Wilcher, K., & Yucelen, T. (2020). On performance improvement of gain-scheduled model reference adaptive control laws. In AIAA Scitech 2020 Forum (p. 1118) [link].
Pakmehr, M., & Yucelen, T. (2014). Decentralized adaptive control of uncertain systems with gain scheduled reference models. In American Control Conference (pp. 709-714) [link].
Pakmehr, M., & Yucelen, T. (2014). Adaptive control of uncertain systems with gain scheduled reference models and constrained control inputs. In American Control Conference (pp. 691-696) [link].
Output Feedback Generalizations
Ristevski, S., Merve Dogan, K., Yucelen, T., & Muse, J. A. (2021). Output Feedback Adaptive Control of Uncertain Dynamic Systems with Actuator Dynamics. Journal of Guidance, Control, and Dynamics, 44(12), 2311-2317 [link].
Nguyen, N. T., Hashemi, K. E., Yucelen, T., & Arabi, E. (2018). Output feedback adaptive control of non-minimum phase systems using optimal control modification. In 2018 AIAA Guidance, Navigation, and Control Conference (p. 1571) [link].
Kim, K., Calise, A. J., & Yucelen, T. (2017). Parameter‐dependent Riccati equation–based output feedback adaptive control. International Journal of Adaptive Control and Signal Processing, 31(11), 1608-1622 [link].
Rajpurohit, T., Haddad, W. M., & Yucelen, T. (2016). Output feedback adaptive control with low-frequency learning and fast adaptation. Journal of Guidance, Control, and Dynamics, 39(1), 16-31 [link].
Yucelen, T., & Haddad, W. M. (2012). Output feedback adaptive stabilization and command following for minimum phase dynamical systems with unmatched uncertainties and disturbances. International Journal of Control, 85(6), 706-721 [link].
Large-Scale and Modular Systems
Yucelen, T., Gruenwald, B. C., Merve Dogan, K., Chakravarthy, A., & Menon, A. (2021). Adaptive control of coupled dynamical systems: A mixed state and output feedback framework. International Journal of Control, 94(7), 1765-1783 [link].
Gruenwald, B. C., Yucelen, T., & Chakravarthy, A. (2020). Adaptive control of unactuated dynamical systems through interconnections: Stability and performance guarantees. International Journal of Adaptive Control and Signal Processing, 34(4), 484-502 [link].
Gruenwald, B. C., Arabi, E., Yucelen, T., Chakravarthy, A., & McNeely, D. (2020). Decentralised adaptive architectures for control of large-scale active–passive modular systems with stability and performance guarantees. International Journal of Control, 93(3), 490-504 [link].
Yucelen, T., & Shamma, J. S. (2014). Adaptive architectures for distributed control of modular systems. In American Control Conference (pp. 1328-1333) [link].
Yucelen, T., Yang, B. J., & Calise, A. J. (2011). Derivative-free decentralized adaptive control of large-scale interconnected uncertain systems. In IEEE Conference on Decision and Control and European Control Conference (pp. 1104-1109) [link].
Other Considerations
Jaramillo, J., Yildirim, E., Koru, A. T., Yucelen, T., Pakmehr, M., Dunham, J., & Lu, G. (2022). Experimental results on dynamic attitude control allocation for a hexarotor platform with faulty motors. In AIAA SciTech 2022 Forum (p. 0058). [link].
Fravolini, M. L., Costante, G., Yucelen, T., & Napolitano, M. R. (2020). Interval prediction models for data-driven design of aerial vehicle’s robust adaptive controllers. Journal of Guidance, Control, and Dynamics, 43(8), 1512-1528 [link].
Dogan, K. M., Ristevski, S., Yucelen, T., & Muse, J. A. (2020). On suppressing the effect of measurement noise in model reference adaptive control. In AIAA SciTech 2020 Forum (p. 0842) [link].
Fresconi, F., Greunwald, B., & Yucelen, T. (2017). Adaptive Missile Flight Control for Complex Aerodynamic Phenomena. In AIAA Atmospheric Flight Mechanics Conference (p. 4207) [link].
Rafi, M., Steck, J. E., Chakravarthy, A., & Yucelen, T. (2017). Approaches to real-time predictive estimation of loss-of-control events and boundaries on transport aircraft. In AIAA Guidance, Navigation, and Control Conference (p. 1716) [link].
Fravolini, M. L., Yucelen, T., Ficola, A., & Napolitano, M. R. (2017). Probabilistic estimation of the reachable set of model reference adaptive controllers using the scenario approach. International Journal of Control, 90(2), 307-321 [link].
Fravolini, M. L., Yucelen, T., & Napolitano, M. (2017). Probabilistic analysis and verification framework for adaptive flight control. Journal of Guidance, Control, and Dynamics, 40(3), 537-547 [link].
Fravolini, M. L., Yucelen, T., & Campa, G. (2015). Set theoretic performance verification of low‐frequency learning adaptive controllers. International Journal of Adaptive Control and Signal Processing, 29(10), 1243-1258 [link].
Yucelen, T., & Calise, A. J. (2014). Robustness of a derivative-free adaptive control law. Journal of Guidance, Control, and Dynamics, 37(5), 1583-1594 [link].
Chowdhary, G., Yucelen, T., Mühlegg, M., & Johnson, E. N. (2013). Concurrent learning adaptive control of linear systems with exponentially convergent bounds. International Journal of Adaptive Control and Signal Processing, 27(4), 280-301 [link].
Modares, H., Lewis, F., Naghibi-Siastani, M. B., Chowdhary, G., & Yucelen, T. (2013). Adaptive optimal control of partially-unknown constrained-input systems using policy iteration with experience replay. In AIAA Guidance, Navigation, and Control (GNC) Conference (p. 4519) [link].
Yucelen, T., & Calise, A. J. (2011). Derivative-free model reference adaptive control. Journal of Guidance, Control, and Dynamics, 34(4), 933-950 [link].
Yucelen, T., & Calise, A. (2010). Adaptive Control for the Generic Transport Model: A Derivative-Free Approach. In AIAA Infotech@ Aerospace 2010 (p. 3302) [link].
Yang, B. J., Yucelen, T., Calise, A. J., & Shin, J. Y. (2009). An LMI-based stability analysis for adaptive controllers. In American Control Conference (pp. 2593-2598) [link].
Yang, B. J., Yucelen, T., Calise, A., & Shin, J. Y. (2009). LMI-Based Analysis for Stability Margins of Adaptive Flight Control. In AIAA Guidance, Navigation, and Control Conference (p. 6189) [link].
Heterogeneous Multiagent Systems
Koru, A. T., Sarsılmaz, S. B., Yucelen, T., Muse, J. A., Lewis, F. L., & Açıkmeşe, B. (2022). Regional Eigenvalue Assignment in Cooperative Linear Output Regulation. IEEE Transactions on Automatic Control [link].
Deniz, M., Dogan, K. M., & Yucelen, T. (2022). A distributed adaptive architecture with the nonlinear reference model for safe finite-time control of uncertain multiagent systems. International Journal of Systems Science, 1-13 [link].
Sarsilmaz, S. B., & Yucelen, T. (2021). A distributed control approach for heterogeneous linear multiagent systems. International Journal of Control, 94(5), 1402-1414 [link].
Koru, A. T., Sarsılmaz, S. B., Yucelen, T., & Johnson, E. N. (2020). Cooperative output regulation of heterogeneous multiagent systems: A global distributed control synthesis approach. IEEE Transactions on Automatic Control, 66(9), 4289-4296 [link].
Koru, A. T., Maadani, M., Sarsilmaz, S. B., Johnson, E. N., Butcher, E. A., & Yucelen, T. (2020). Adaptive consensus control of rigid body attitude motion based on rotation matrices. In AIAA SciTech 2020 Forum (p. 1824) [link].
Dogan, K. M., Gruenwald, B. C., Yucelen, T., Muse, J. A., & Butcher, E. A. (2019). Distributed adaptive control and stability verification for linear multiagent systems with heterogeneous actuator dynamics and system uncertainties. International Journal of Control, 92(11), 2620-2638 [link].
Yildirim, E., Sarsilmaz, S. B., & Yucelen, T. (2019). Application of a distributed adaptive control approach to a heterogeneous multiagent mechanical platform. In AIAA SciTech 2019 Forum (p. 1427) [link].
De La Torre, G., & Yucelen, T. (2018). Adaptive architectures for resilient control of networked multiagent systems in the presence of misbehaving agents. International Journal of Control, 91(3), 495-507 [link].
De La Torre, G., & Yucelen, T. (2015). State emulator-based adaptive architectures for resilient networked multiagent systems over directed and time-varying graphs. In ASME Dynamic Systems and Control Conference (Vol. 57267, p. V003T37A006) [link].
Yucelen, T., & Johnson, E. N. (2013). Control of multivehicle systems in the presence of uncertain dynamics. International Journal of Control, 86(9), 1540-1553 [link].
Composing Complex Behaviors
Witke, K. A., Koru, A. T., & Yucelen, T. (2022). An application of distributed spatial formation control with multiplex information networks over directed graphs. In AIAA SciTech 2022 Forum (p. 1219) [link].
Sarsılmaz, S. B., & Yucelen, T. (2021). Distributed control of linear multiagent systems with global and local objectives. Systems & Control Letters, 152, 104928 [link].
Tran, D., & Yucelen, T. (2021). Convergence rate control of multiagent systems. In 2021 American Control Conference (pp. 2726-2731) [link].
Tran, D., & Yucelen, T. (2020). On new Laplacian matrix with a user-assigned nullspace in distributed control of multiagent systems. In 2020 American Control Conference (pp. 3517-3522) [link].
Yildirim, E., Sarsilmaz, S. B., Tran, D. M., & Yucelen, T. (2020). Control of multiagent systems with local and global objectives: Experimental results. In AIAA SciTech 2020 Forum (p. 1115) [link].
Sarsilmaz, S. B., Yucelen, T., & Oswald, T. (2019). Distributed control of multiagent systems with heterogeneity in synchronization roles. In 2019 American Control Conference (pp. 102-107) [link].
Jaramillo, J., Wieczorek, T., Tran, D. M., Dadi, V. S., Yucelen, T., & Chellappan, S. (2019). Experimental Validation of a Distributed Control Approach Based on Multiplex Networks on Formations of Unmanned Aerial Vehicles. In AIAA SciTech 2019 Forum (p. 1190) [link].
Tran, D., Yucelen, T., & Pasiliao, E. L. (2018). Formation control with multiplex information networks. IEEE Transactions on Control Systems Technology, 28(2), 462-476 [link].
Limited Resources
Kurtoglu, D., Yucelen, T., & Yildirim, E. (2022). Multiagent networks with a misbehaving node: Control without the knowledge of global network objective. IFAC Networked Systems, 55(13), 204-209 [link].
Yildirim, E., Yucelen, T., & Kurtoglu, D. (2022). Control of homogeneous linear multiagent networks in the presence of a misbehaving node. IFAC Networked Systems, 55(13), 61-66 [link].
Yildirim, E., & Yucelen, T. (2022). A worst-case numerical study on control of multiagent systems with misbehaving nodes. In AIAA SciTech 2022 Forum (p. 1594) [link].
Yildirim, E., & Yucelen, T. (2022). Discrete-time control of multiagent systems with a misbehaving node. In 2022 American Control Conference (pp. 48-53) [link].
Yildirim, E., & Yucelen, T. (2021). Control of multiagent networks with misbehaving nodes. International Journal of Systems Science, 52(13), 2858-2874 [link].
Yildirim, E., Yucelen, T., & Ristevski, S. (2021). Application of a distributed control approach to an aerial swarm with a misbehaving vehicle. In AIAA SciTech 2021 Forum (p. 0647) [link].
Yildirim, E., Sarsilmaz, S. B., Koru, A. T., & Yucelen, T. (2019). On control of multiagent systems in the presence of a misbehaving agent. IEEE Control Systems Letters, 4(2), 456-461 [link].
Finite-Time Control with Time Transformation
Kurtoglu, D., Yucelen, T., & Tran, D. M. (2022). Distributed control with time transformation: User-defined finite time convergence and beyond. In AIAA SciTech 2022 Forum (p. 1716) [link].
Tran, D., Yucelen, T., & Sarsilmaz, S. B. (2021). Finite-time control of multiagent networks as systems with time transformation and separation principle. Control Engineering Practice, 108, 104717 [link].
Arabi, E., & Yucelen, T. (2021). Control of uncertain multiagent systems with spatiotemporal constraints. IEEE Transactions on Control of Network Systems, 8(3), 1107-1115 [link].
Arabi, E., Yucelen, T., & Singler, J. R. (2021). Finite‐time distributed control with time transformation. International Journal of Robust and Nonlinear Control, 31(1), 107-130 [link].
Tran, D., & Yucelen, T. (2020). Finite-time control of perturbed dynamical systems based on a generalized time transformation approach. Systems & Control Letters, 136, 104605 [link].
Yucelen, T., Kan, Z., & Pasiliao, E. (2018). Finite-time cooperative engagement. IEEE Transactions on Automatic Control, 64(8), 3521-3526 [link].
Kan, Z., Yucelen, T., Doucette, E., & Pasiliao, E. (2017). A finite-time consensus framework over time-varying graph topologies with temporal constraints. Journal of Dynamic Systems, Measurement, and Control, 139(7), 071012 [link].
Estimation and Sensor Fusion
Tran, D., Casbeer, D. W., & Yucelen, T. (2022). A distributed counting architecture for exploring the structure of anonymous active–passive networks. Automatica, 146, 110550 [link].
Tran, D., Yucelen, T., Jagannathan, S., & Casbeer, D. (2021). Distributed coestimation in heterogeneous sensor networks. International Journal of Control, 94(8), 2032-2046 [link].
Arabi, E., Panagou, D., & Yucelen, T. (2021). Adaptive active-passive networked multiagent systems. In 2021 American Control Conference (pp. 1113-1118) [link].
Raj, A., Jagannathan, S., & Yucelen, T. (2020). Distributed adaptive state estimation and tracking by using active‐passive sensor networks. International Journal of Adaptive Control and Signal Processing, 34(3), 330-353 [link].
Peterson, J. D., Yucelen, T., Sarangapani, J., & Pasiliao, E. L. (2019). Active-passive dynamic consensus filters with reduced information exchange and time-varying agent roles. IEEE Transactions on Control Systems Technology, 28(3), 844-856 [link].
Peterson, J. D., Yucelen, T., & Jagannathan, S. (2019). Active-passive dynamic consensus filters for linear time-invariant multiagent systems. In 2019 American Control Conference (pp. 4683-4688) [link].
Tran, D. M., Yucelen, T., & Jagannathan, S. (2019). Dynamic information fusion with the integration of local observers, value of information, and active-passive consensus filters. In AIAA SciTech 2019 Forum (p. 2262) [link].
Wang, J., Butcher, E. A., & Tansel, Y. (2019). Space-based relative orbit estimation using information sharing and the consensus Kalman filter. Journal of Guidance, Control, and Dynamics, 42(3), 491-507 [link].
Wang, J., Butcher, E. A., & Yucelen, T. (2018). Extended Kalman filter and observability analysis for consensus estimation of spacecraft relative motion. In 2018 AIAA Guidance, Navigation, and Control Conference (p. 1580) [link].
Tran, D., Yucelen, T., Sarsilmaz, S. B., & Jagannathan, S. (2017). Distributed input and state estimation using local information in heterogeneous sensor networks. Frontiers in Robotics and AI, 4, 30 [link].
Yucelen, T., & Peterson, J. D. (2016). Distributed control of active–passive networked multiagent systems. IEEE Transactions on Control of Network Systems, 4(4), 707-715 [link].
Peterson, J. D., Yucelen, T., Chowdhary, G., & Kannan, S. (2015). Exploitation of heterogeneity in distributed sensing: An active-passive networked multiagent systems approach. In 2015 American Control Conference (pp. 4112-4117) [link].
Sadikhov, T., Demetriou, M. A., Haddad, W. M., & Yucelen, T. (2014). Adaptive estimation using multiagent network identifiers with undirected and directed graph topologies. Journal of Dynamic Systems, Measurement, and Control, 136(2), 021018 [link].
Other Considerations
Tran, D. M., Dang, S., Yucelen, T., & Chellappan, S. (2020). An experiment on vision-based leader-following for multiagent systems. In AIAA SciTech 2020 Forum (p. 0390) [link].
Maadani, M., Butcher, E. A., & Yucelen, T. (2018). Periodically switched communication topology in multi-agent consensus control: Stability and Floquet theory. In American Control Conference (pp. 3792-3797) [link].
Yucelen, T., Peterson, J. D., & Moore, K. L. (2015). Control of networked multiagent systems with uncertain graph topologies. In ASME Dynamic Systems and Control Conference (Vol. 57267, p. V003T37A003) [link].
De La Torre, G., & Yucelen, T. (2015). Consensus with reduced communication links via relative neighboring velocity information. In 2015 American Control Conference (pp. 3410-3415) [link].
De La Torre, G., Yucelen, T., & Johnson, E. (2014). Bounded hybrid connectivity control of networked multiagent systems. IEEE Transactions on Automatic Control, 59(9), 2480-2485 [link].
Yucelen, T., & Haddad, W. M. (2014). Consensus protocols for networked multi-agent systems with a uniformly continuous quasi-resetting architecture. International Journal of Control, 87(8), 1716-1727 [link].
Yucelen, T., & Egerstedt, M. (2012). Control of multiagent systems under persistent disturbances. In American Control Conference (pp. 5264-5269) [link].
Event-Triggered Control
Kurtoglu, D., Jaramillo, J., Ristevski, S., Pimentel, A., Yucelen, T., & Muse, J. A. (2023). Experimental Validation of a Distributed Norm-Free and Adaptive Event-Triggered Control Approach on an Aerial Multiagent System. In AIAA SciTech 2023 Forum (p. 2649) [link].
Kurtoglu, D., Yucelen, T., Ristevski, S., & Muse, J. A. (2022). Norm-free adaptive event-triggering rule for distributed control of multiagent systems. International Journal of Systems Science, 1-11 [link].
Ristevski, S., Yucelen, T., & Muse, J. A. (2022). Distributed event-triggered control with local solution-predictor curves for linear multiagent systems. In 2022 American Control Conference (pp. 1763-1768) [link].
Ristevski, S., Yucelen, T., & Muse, J. A. (2022). Scheduling local information exchange in linear multiagent systems through an event-triggering approach. In AIAA SCITECH 2022 Forum (p. 0768) [link].
Kurtoglu, D., & Yucelen, T. (2021). A time transformation approach to finite-time distributed control with reduced information exchange. IEEE Control Systems Letters, 6, 458-463 [link].
Ristevski, S., Yucelen, T., & Muse, J. A. (2021). Experimental validation of an event-triggering approach for scheduling networked guidance data transmissions. In AIAA SciTech 2021 Forum (p. 0973) [link].
Ristevski, S., Yucelen, T., & Muse, J. A. (2021). A discrete-time event-triggering approach for scheduling guidance data transmissions in networked control systems. In IEEE Conference on Decision and Control (pp. 1980-1985) [link].
Dogan, K. M., Yucelen, T., & Muse, J. A. (2021). On scheduling actuator data transmission in discrete-time networked adaptive systems. In 2021 American Control Conference (pp. 1107-1112) [link].
Ristevski, S., Yucelen, T., & Muse, J. A. (2021). An event-triggered distributed control architecture for scheduling information exchange in networked multiagent systems. IEEE Transactions on Control Systems Technology, 30(3), 1090-1101 [link].
Dogan, K. M., Yucelen, T., & Muse, J. A. (2019). Hedging approach for scheduling actuator data transmission in networked adaptive control systems. IFAC Workshop on Adaptive and Learning Systems, 52(29), 110-115 [link].
Albattat, A., Gruenwald, B., & Yucelen, T. (2017). Design and analysis of adaptive control systems over wireless networks. Journal of Dynamic Systems, Measurement, and Control, 139(7) [link].
Albattat, A., Gruenwald, B. C., & Yucelen, T. (2016). Output feedback adaptive control of uncertain dynamical systems with event-triggering. Adaptive Control for Robotic Manipulators; CRC Press/Taylor & Francis Group [link].
Albattat, A., Gruenwald, B. C., & Yucelen, T. (2016). On event-triggered adaptive architectures for decentralized and distributed control of large-scale modular systems. Sensors, 16(8), 1297 [link].
Human-System Interactions
Koru, A. T., Arabi, E., Dogan, K. M., Yucelen, T., Sipahi, R., & Yildiz, Y. (2020). Set-Theoretic Model Reference Adaptive Control for Performance Guarantees in Human-in-the-Loop Systems; A Pilot Study. In AIAA SciTech 2020 Forum (p. 1340) [link].
Lu, Y., Sipahi, R., Wang, Y., & Yucelen, T. (2020). Observer-Based Design to Mathematically Model Human Behavior in a Cursor Tracking Game. In AIAA SciTech 2020 Forum (p. 0596) [link].
Koru, A. T., Yucelen, T., Sipahi, R., Ramírez, A., & Dogan, K. M. (2019). Stability of human-in-the-loop multiagent systems with time delays. In 2019 American Control Conference (pp. 4854-4859) [link].
Arabi, E., Yucelen, T., Sipahi, R., & Yildiz, Y. (2019). Human-in-the-loop systems with inner and outer feedback control loops: Adaptation, stability conditions, and performance constraints. In AIAA SciTech 2019 Forum (p. 2183) [link].
Yucelen, T., Yildiz, Y., Sipahi, R., Yousefi, E., & Nguyen, N. (2018). Stability limit of human-in-the-loop model reference adaptive control architectures. International Journal of Control, 91(10), 2314-2331 [link].
Yousefi, E., Demir, D. F., Sipahi, R., Yucelen, T., & Yildiz, Y. (2017). Effects of linear filter on stability and performance of human-in-the-loop model reference adaptive control architectures. In ASME Dynamic Systems and Control Conference (Vol. 58271, p. V001T15A001) [link].
Yousefi, E., Yildiz, Y., Sipahi, R., & Yucelen, T. (2017). The effect of remote-signal feedback architectures on the stability of human-in-the-loop telerobotics in the presence of time-delays. In 2017 IEEE Conference on Control Technology and Applications (pp. 1288-1293) [link].
Yousefi, E., Yildiz, Y., Sipahi, R., & Yucelen, T. (2017). Stability analysis of a human-in-the-loop telerobotics system with two independent time-delays. IFAC World Congress, 50(1), 6519-6524 [link].
Handling Attacks in Cyber-Physical Systems
Jin, X., Haddad, W. M., & Yucelen, T. (2017). An adaptive control architecture for mitigating sensor and actuator attacks in cyber-physical systems. IEEE Transactions on Automatic Control, 62(11), 6058-6064 [link].
Sadikhov, T., Haddad, W. M., Yucelen, T., & Goebel, R. (2017). Approximate consensus of multiagent systems with inaccurate sensor measurements. Journal of Dynamic Systems, Measurement, and Control, 139(9), 091003 [link].
Arabi, E., Yucelen, T., & Haddad, W. M. (2017). Mitigating the effects of sensor uncertainties in networked multi-agent systems. Journal of Dynamic Systems, Measurement, and Control, 139(4) [link].
Yucelen, T., Haddad, W. M., & Feron, E. M. (2016). Adaptive control architectures for mitigating sensor attacks in cyber-physical systems. Cyber-Physical Systems, 2(1-4), 24-52 [link].
Other Considerations
Koru, A. T., Johnson, E. N., Yucelen, T., & Sarsilmaz, S. B. (2020). On cooperative control of linear multiagent systems over networks with limited bandwidth. In 2020 American Control Conference (pp. 1659-1664) [link].
Nazari, M., Butcher, E. A., Yucelen, T., & Sanyal, A. K. (2016). Decentralized consensus control of a rigid-body spacecraft formation with communication delay. Journal of Guidance, Control, and Dynamics, 39(4), 838-851 [link].